 Tools
Tools Python State Info Panelを使う
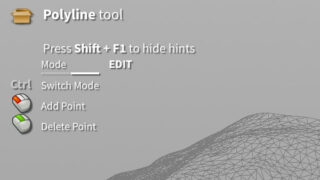
環境:Houdini 20.0.751Viewer StateにState Info Panelを使ってUIをつくります。def __init__(self, state_name, scene_viewer): self.state_na...
Tools 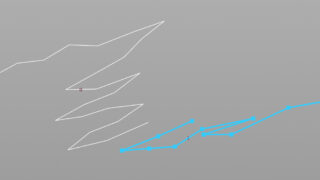 Tools
Tools 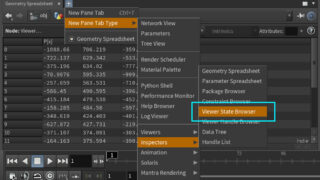 Debugging
Debugging  Tools
Tools  Tools
Tools  Tools
Tools  Python
Python  Terrain
Terrain  Polyline
Polyline  SOP
SOP