 Polyline
Polyline ポリラインをベジェ制御点に分割する
ガイド用に作成したポリラインをベジェ曲線用に分割していく。ループにも対応しています。2次ベジェ曲線(3点の制御点)最初と最後以外の直線を分割して、3点ずつカーブをつくり、つないでいく。//// ポリラインをベジェ曲線(2次)の制御点ラインへ...
Polyline  Math
Math  Math
Math 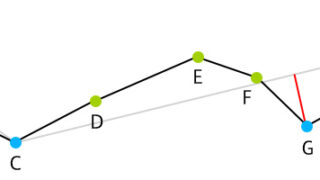 Polyline
Polyline  SOP
SOP 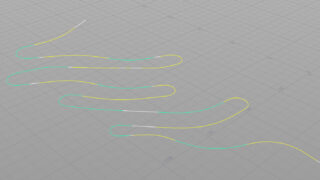 Polyline
Polyline  Math
Math  Math
Math  Texture
Texture  Polyline
Polyline