 Math
Math Catmull-Romスプラインをベジェ曲線に変換する
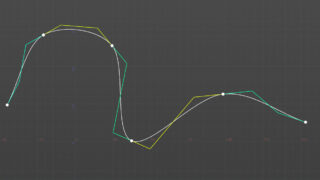
Catmull-Romスプラインの接線ベクトルを使うことで3次ベジェ曲線の制御点を生成することができる。Catmull-Romスプライン曲線計算式Catmull-Romスプラインの接線ベクトル\(V_0\)、\(V_1\)を利用する。3次ベ...
Math 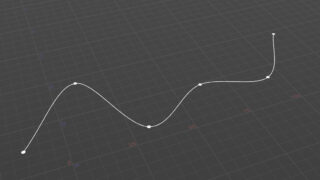 Math
Math 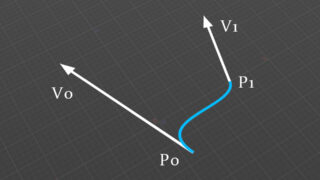 Math
Math 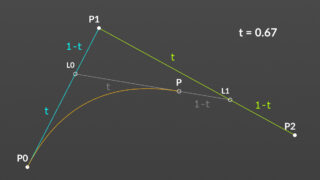 Math
Math  Math
Math  Math
Math  Math
Math  Math
Math  Math
Math  Math
Math