 Tools
Tools ポリライン生成ツール
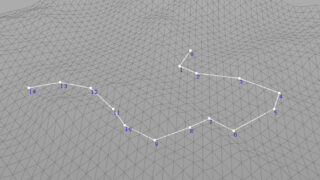
環境:Houdini 20.0.751Python Viewer Stateの習作でビュー上にポイントを打ってポリラインを編集するツールを作成した。ポイントの新規追加、移動、削除、挿入と一通りのことができるようになっている。ノードを選択した...
Tools  SOP
SOP  Polyline
Polyline  Polyline
Polyline 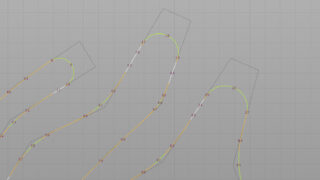 Math
Math  Python
Python  Math
Math  Polyline
Polyline  Polyline
Polyline  Polyline
Polyline