 Math
Math リフトの振り子運動
外から加わる力を角速度に変換して、リフトの動きを表現します。角速度の計算角速度についてはこのページを参考に振り子運動と角速度重力加速度から角速度への変換はこのような図になる。角速度ωの式は、ω = g*sinΘ/rリフトの進行方向の加速度に...
Math  SOP
SOP  Math
Math  Polyline
Polyline  Polyline
Polyline  VEX
VEX 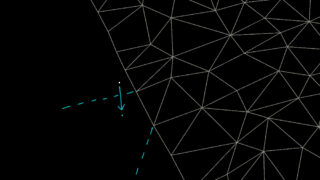 VEX
VEX  SOP
SOP  SOP
SOP