 Math
Math 保護中: 制御点で描くクロソイド曲線
このコンテンツはパスワードで保護されています。閲覧するには以下にパスワードを入力してください。 パスワード:
Math  Polyline
Polyline  Polyline
Polyline  VEX
VEX  VEX
VEX  Polyline
Polyline  Polyline
Polyline  Terrain
Terrain  Terrain
Terrain 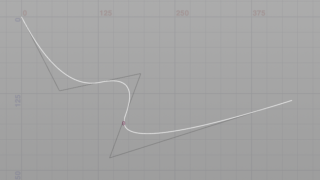 Polyline
Polyline