 Math
Math ベジェ曲線の仕組み
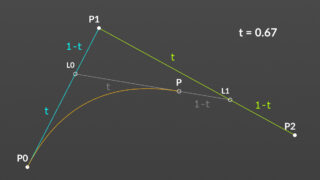
ベジェ曲線の特徴・ベジェ曲線は制御点によって定義される・曲線は必ず制御点の内側に描画される制御点の線形補完を繰り返すことで滑らかな曲線を生成します。1次のベジェ曲線P = (1-t)P0 + tP11次のベジェ曲線は一本の直線です。tはパラ...
Math  Math
Math  Python
Python  Mesh
Mesh  Tools
Tools  Mesh
Mesh  Mesh
Mesh  VEX
VEX  Mesh
Mesh  Mesh
Mesh