カーブを単純化するアルゴリズムです。
処理の流れ
1:始点と終点をプロット対象とする。
2:プロット対象をラインで結び、その間の各点との距離を調べる
3:許容距離以上で一番遠いポイントを選び、新たにプロット対象とする
4:2~3の処理を再帰的に繰り返す
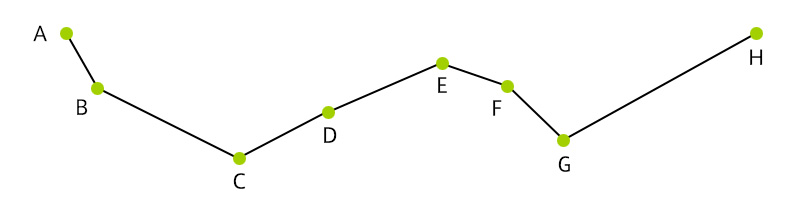
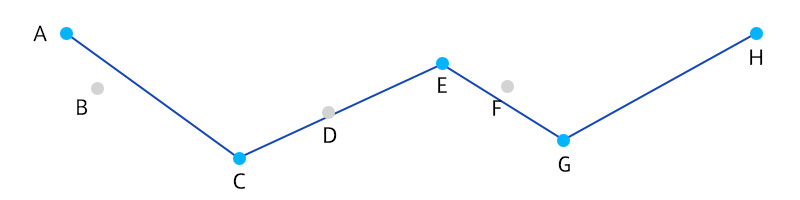
最初の状態。許容距離を決めます。
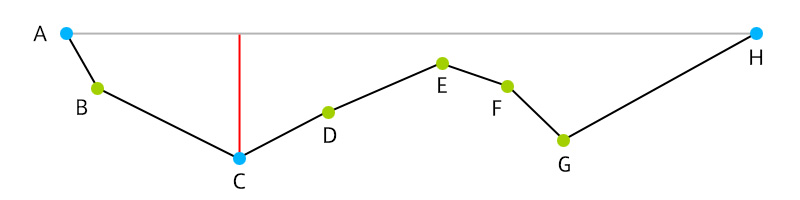
始点Aと終点Hをラインで結ぶ。間のポイントで許容距離以上で一番遠いポイントはCとなる。ここでA、H、Cは確定する。
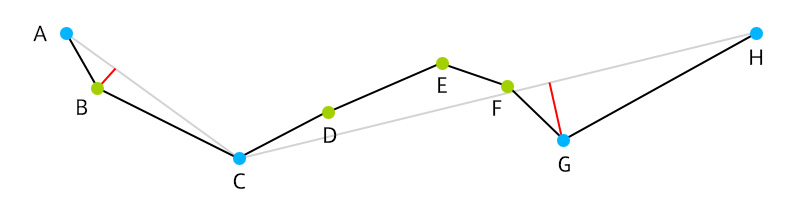
AとCをラインで結び、同じように間のポイントで一番遠いものを探す。Bが一番遠いポイントになるが、許容距離以下なので除外する。今度はCとHをラインで結び、間のポイントで一番遠いポイントを探す。Gが許容距離以上なので確定する。
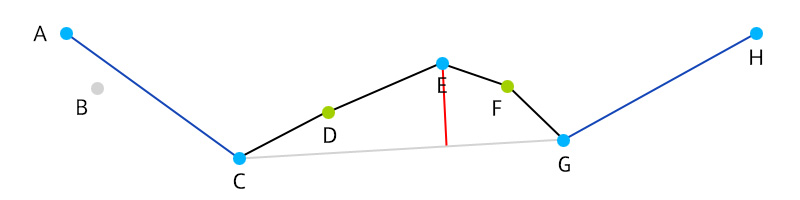
CとGをラインで結び、間のポイントがEが確定する。GとHの間にはポイントがないのスキップ。
CとEを結び、間のポイントDは許容距離以下なので除外。EとGの間にあるFも許容距離以下なので除外する。
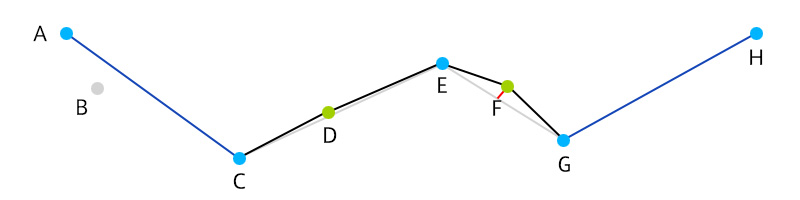
こうして、A-C-E-G-Hを結んだカーブが残る。
コード
必ずSort SOPを直前に挟み、頂点の並びを整えておく。
再帰処理を使うため、Pythonでコードを書いた。変数epsilonに許容距離を入力することで機能する。
node = hou.pwd()
geo = node.geometry()
# 許容距離
epsilon = 0.5
# ポイントクラス
class Point:
def __init__(self, index, pos):
self.index = index
self.pos = hou.Vector3(pos)
# Douglas Peuckerのポリラインリダクション
def douglas_peucker(points, epsilon):
if len(points) < 3:
return points
start, end = points[0], points[-1]
max_distance = 0.0
index = 0
# 最大距離とそのインデックスを計算
for i in range(1, len(points) - 1):
distance = point_line_distance(points[i], start, end)
if distance > max_distance:
max_distance = distance
index = i
# 許容距離を超える場合は再帰的に処理
if max_distance > epsilon:
left = douglas_peucker(points[:index + 1], epsilon)
right = douglas_peucker(points[index:], epsilon)
return left[:-1] + right
else:
return [start, end]
# 線分と点の最短距離
def point_line_distance(point, start, end):
if start.pos == end.pos:
return (point.pos - start.pos).length()
line_vec = (end.pos - start.pos).normalized()
point_vec = point.pos - start.pos
d = line_vec.dot(point_vec)
projection = start.pos + line_vec * d
dist = (point.pos - projection).length()
return dist
# Pointオブジェクトのリスト
points = []
index = 0
for pt in geo.points():
points.append(Point(index, pt.position()))
index += 1
# 簡略化されたポリラインを取得
simplified_points = douglas_peucker(points, epsilon)
# ポイントインデックスをリストにまとめる
result = []
for i in range(len(simplified_points)):
result.append(simplified_points[i].index)
# Detailに情報を保存
geo.addArrayAttrib(hou.attribType.Global, 'result', hou.attribData.Int, 1)
geo.setGlobalAttribValue('result', result)この後にPoint Wrangleをつないで不要なポイントを削除する。
// Run Over: Points
int pts[] = detail(0, "result");
if(len(pts) > 0 && find(pts, @ptnum) < 0)
removepoint(0, @ptnum);