線分ABと点Pの最短距離と交点を求めるには内積を使う。
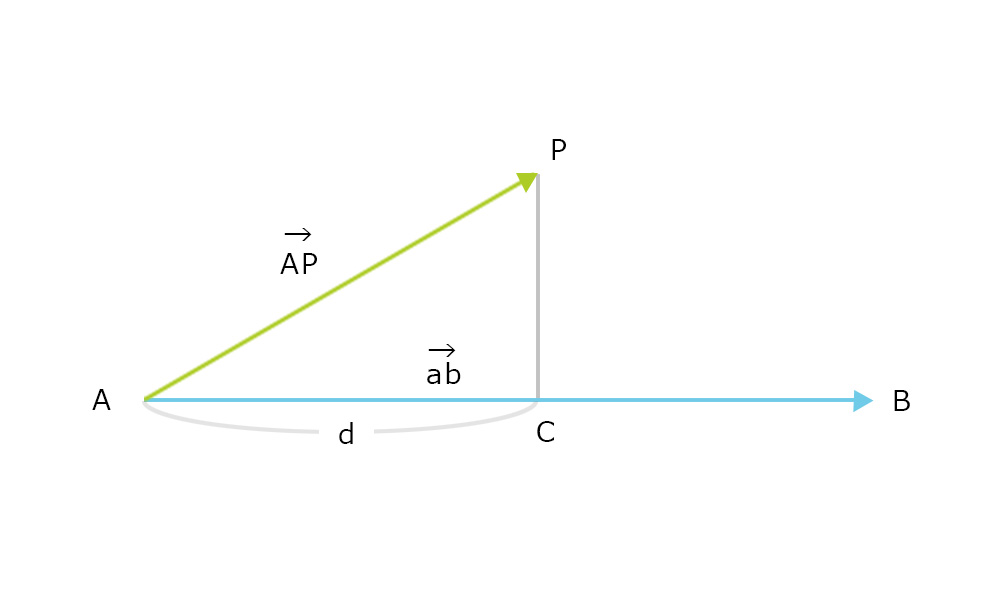
片方のベクトルが正規化されていた場合、内積の値が投影した長さになることを利用する。Aと点Pを結んだベクトルAPと、ベクトルABを正規化したベクトルabの内積はdになる。これによってA+ab*dで交点Cが計算できる。交点Cが分かればPとCの距離(点と直線の最短距離)を求めることができる。
vector ab = normalize(B - A);
float d = dot(P-A, ab);
// 交点座標
vector C = A + ab * d;実例:ライン
// input0: line
// input1: point
// RunOver: Detail
vector start = point(0, "P", 0);
vector end = point(0, "P", 1);
vector point = point(1, "P", 0);
vector line_vec = normalize(end - start);
vector point_vec = point - start;
float d = (dot(point_vec, line_vec));
// 直線の範囲内か判別
if(d >= 0 && d < length(start - end))
{
// 交点座標
vector projection = start + line_vec * d;
addpoint(0, projection);
}実例:カーブ
ループで各エッジと比較する。交点座標がエッジ内に収まっているかチェックする。
// input1: point
// input2: polyline
float minDist = 10000;
vector closestCross;
vector point = point(1, "P", 0);
// 各エッジとの交点を比較する
for(int i = 0; i < npoints(2)-1; i++)
{
vector start = point(2, "P", i);
vector end = point(2, "P", i+1);
vector line_vec = normalize(end-start);
float d = dot(point-start, line_vec);
// 直線の範囲内か判別
if(d >= 0 && d <= length(start-end))
{
vector projection = start + line_vec * d; // 新しいポイント
float dist = length(projection-point);
// 最小の値なら更新
if(dist < minDist)
{
minDist = dist;
closestCross = projection;
}
}
// 位置が始点より前の場合
else if(d < 0)
{
float dist = length(point-start);
// 最小の値なら更新
if(dist < minDist)
{
minDist = dist;
closestCross = start;
}
}
// 位置が終点より後ろの場合
else if(d > length(start-end))
{
float dist = length(point-end);
// 最小の値なら更新
if(dist < minDist)
{
minDist = dist;
closestCross = end;
}
}
}
int pt = addpoint(0, closestCross);関数
// 点Pからエッジに最も近い点Cが、そのエッジ上に存在するか
// 存在すれば点Cを返す
function int isClosestPointOnEdge(vector start; vector end; vector point; export vector cross)
{
int result = 0;
vector line_vec = normalize(end - start);
vector point_vec = point - start;
float d = (dot(point_vec, line_vec));
// 直線の範囲内か判別
if(d >= 0 && d < length(start - end))
{
// 交点座標
cross = start + line_vec * d;
result = 1;
}
return result;
}
