クルマが遠心力でカーブの外側に出ないように適切なバンク角をつける計算。
計算
\(θ=atan(\frac{a-gμ}{g+aμ})\)が傾斜の角度になる。
μ:摩擦係数
g:重力加速度(9.8m/s2)
R:曲率半径(m)
v:車両の速度(m/s)
a:遠心加速度\(\frac{v^2}{R}\)
実装
線形の曲率半径とハーフベクトルを事前に求めておく。ハーフベクトルは遠心力が働く方向の目安として利用する。
f@__radius:曲率半径
v@__h:ハーフベクトル
//
// 遠心力を計算し、
// ハーフベクトルの長さに掛ける
// RunOver:Points
//
int prim[] = pointprims(0, @ptnum);
float speed = prim(0, "designSpeed", prim[0]); // 想定速度(km/h)
float f = prim(0, "friction", prim[0]); // 摩擦係数
// 時速を秒速へ(例:90kmh -> 25m/s)
float v = speed * 1000 / 60/60;
float g = 9.8; // 重力(m/s^2)
float R = f@__radius; // 曲率半径
// 曲率がある場合(=直線でない)
if(R > 0)
{
// 遠心力=速度の二乗÷曲率半径
float a = v * v / R;
// 勾配の角度を求める
float theta = atan((a-g*f)/(g+a*f));
if(theta < 0) theta = 0;
//f@__theta = degrees(theta);
// 進行方向の行列
matrix world = maketransform(@N, @up);
matrix inverse = invert(world);
// ハーフベクトルを原点に座標変換し、型勾配のベクトルと比較
vector localH = v@__h * inverse;
vector localLeft = set(cos(theta), sin(theta), 0);
if(localH.x < 0) localLeft.y *= -1;
vector left = localLeft * world;
@up = cross(@N, left);
}
UPベクトルはSmooth SOP等で滑らかにする。
その他
国土交通省の道路構造令の計算式も内容は同じになっている。
参考:国土交通省 道路構造令の各規定の解説 III-4.線形
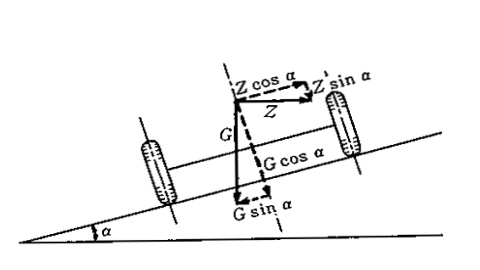
遠心力=質量 * 速度2 / 曲率半径
\(Z=\frac{G}{g}⋅\frac{v^2}{R}\)
Z:遠心力
v:速度(m/s)
g:重力加速度(9.81m/s^2)
G:クルマの総重量(N)
R:曲率半径(m)
f:路面とタイヤの摩擦係数
横滑りを生じさせない条件
\(Zcosθ-Gsinθ≦f(Zsinθ+Gcosθ)\)
式を変形してθにまとめる
\(Zcosθ – Gsinθ ≦ fZsinθ + fGcosθ\)
\(Zcosθ – fGcosθ ≦ fZsinθ + Gsinθ\)
\(cosθ(Z – fG) ≦ sinθ(fZ + G)\)
\(\frac{Z – fG}{fZ + G}≦\frac{sinθ}{cosθ}\)
\(\frac{Z – fG}{fZ + G}≦ tanθ\)
\(θ ≧ atan(\frac{Z – fG}{fZ + G})\)
θは\(atan(\frac{Z-fG}{fZ+G})\)以上の角度となる。
※1ニュートンは1kgの質量に1m/s2の加速度を発生させる力(単位:kg・m/s^2)
質量が1トン=1000kgの場合
総重量G = 1000kg * 9.81m/s2 = 9810N